10kg Payload 1671mm Reaching Distance Robotic Arm QJR10-1

QJR10-1
- The design is highly compact, flexible installation with ground or inverse position.
- 6 axis robot with large workspace, high running speed, high repeat positioning accuracy, suitable for spraying, loading and unloading, handling, sorting, assembly and other wide range of applications.
- Repeat positioning accuracy: ±0.05mm
- Armspan: 1410.5mm
- Payload: 10kg
Technical Parameters
| Model | QJR10-1 | |
| Axis Number | 6 | |
| Payload | 10kg | |
| Repeat Positioning | ±0.05mm | |
| Max Armspan | 1671mm | |
| Motion Range | J1 | ±172º |
| J2 | ﹢166º,﹣107º | |
| J3 | ﹢83º,﹣92º | |
| J4 | ±170º | |
| J5 | ±125º | |
| J6 | ±360º | |
| Max Speed | J1 | 172º/s |
| J2 | 172º/s | |
| J3 | 183º/s | |
| J4 | 430º/s | |
| J5 | 430º/s | |
| J6 | 584º/s | |
| Allowable Torque | J4 | 24.6N.m |
| J5 | 24.6N.m | |
| J6 | 9.8N.m | |
| Inertia Moment | J4 | 0.63kg.m² |
| J5 | 0.63kg.m² | |
| J6 | 0.1kg.m² | |
| Robot Body Weight | 250kg | |
| Power Capacity | 3.3kVA | |
| Cabinet Size | 580*600*960mm | |
| Cabinet Weight | 130kg | |
| Source | Three-phase four-wire | |
| Installing Form | Ground, Ceiling | |
| Application | Welding, painting, loading and unloading, handling, sorting, assembly etc. | |
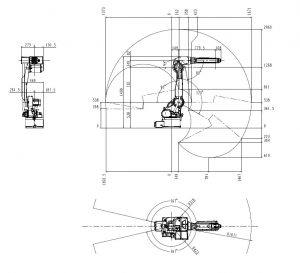
Robot Overall Dimension and Motion Range Drawing
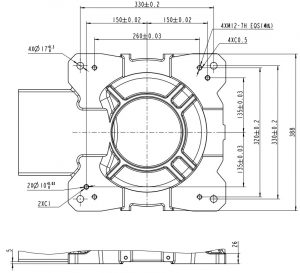
Robot Base Mounting Dimension Drawing
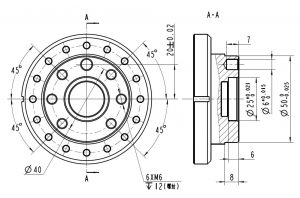
Robot End Installation Dimension Drawing