Painting Robotic Arm QJR6-2700P

QJR6-2700P
- No front singularity wrist construction, optional built-in pipeline, making synchronous tracking spraying teaching job easier.
- Using bus-structure, convenient for expansion and high speed
- Repeat positioning accuracy: ±0.5mm
- Armspan: 2035mm
- Payload: 10kg
Technical Parameters
| Model | QJR6-2700P | |
| Axis Number | 6 | |
| Payload | 6kg | |
| Repeat Positioning | ±0.5mm | |
| Max Armspan | 2701mm | |
| Motion Range | J1 | ±95º |
| J2 | ﹢102º,﹣53º | |
| J3 | ﹢80º,﹣80º | |
| J4 | ±260º | |
| J5 | ±270º | |
| J6 | ±260º | |
| Max Speed | J1 | 108 °/s |
| J2 | 103 °/s | |
| J3 | 115 °/s | |
| J4 | 360 °/s | |
| J5 | 360 °/s | |
| J6 | 360 °/s | |
| Allowable Torque | J4 | 10.96 N.m |
| J5 | 10.96 N.m | |
| J6 | 4.90 N.m | |
| Inertia Moment | J4 | 0.25 kg.m2 |
| J5 | 0.25 kg.m2 | |
| J6 | 0.05 kg.m2 | |
| Robot Body Weight | 400kg | |
| Power Capacity | 3.9kVA | |
| Cabinet Size | 650*750*1150mm | |
| Cabinet Weight | 140kg | |
| Source | Three-phase four-wire | |
| Installing Form | Ground Mounted | |
| Application | For painting, there is no singularity point, making the teaching programming much easier. | |
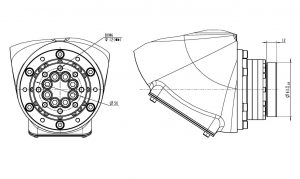
Robot Overall Dimension and Motion Range Drawing

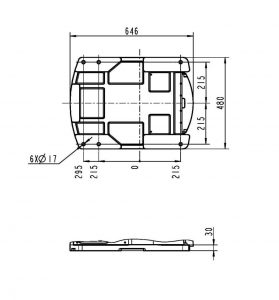
Robot Base Mounting Dimension Drawing
Robot End Installation Dimension Drawing